BOSM -12010 Dilawan-Kapala boring Mesin panggilingan
1. Mangpaat tinamesin :
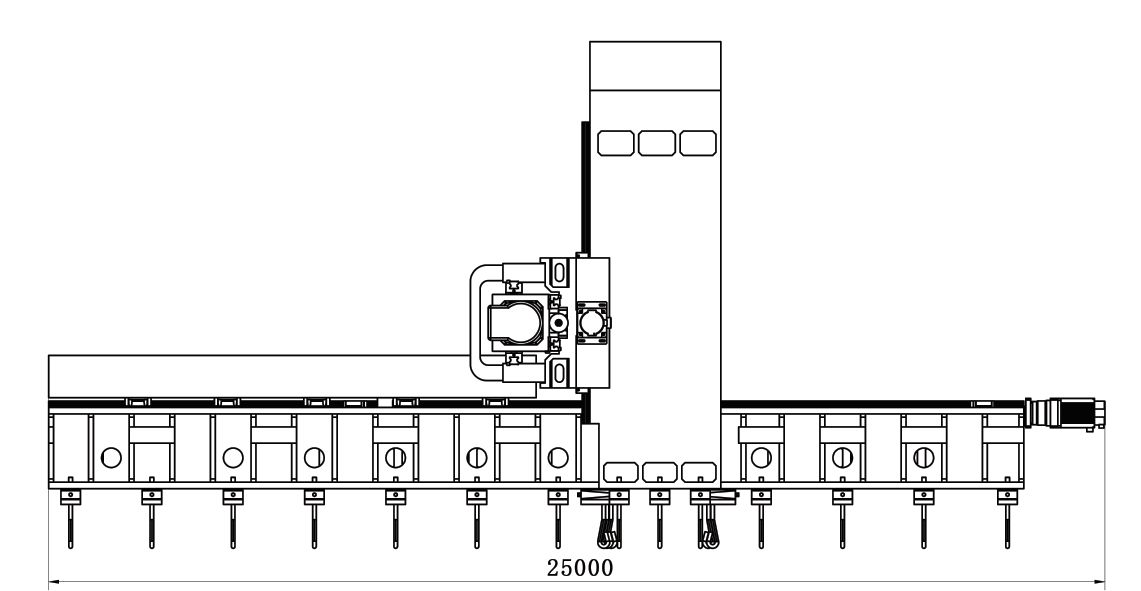
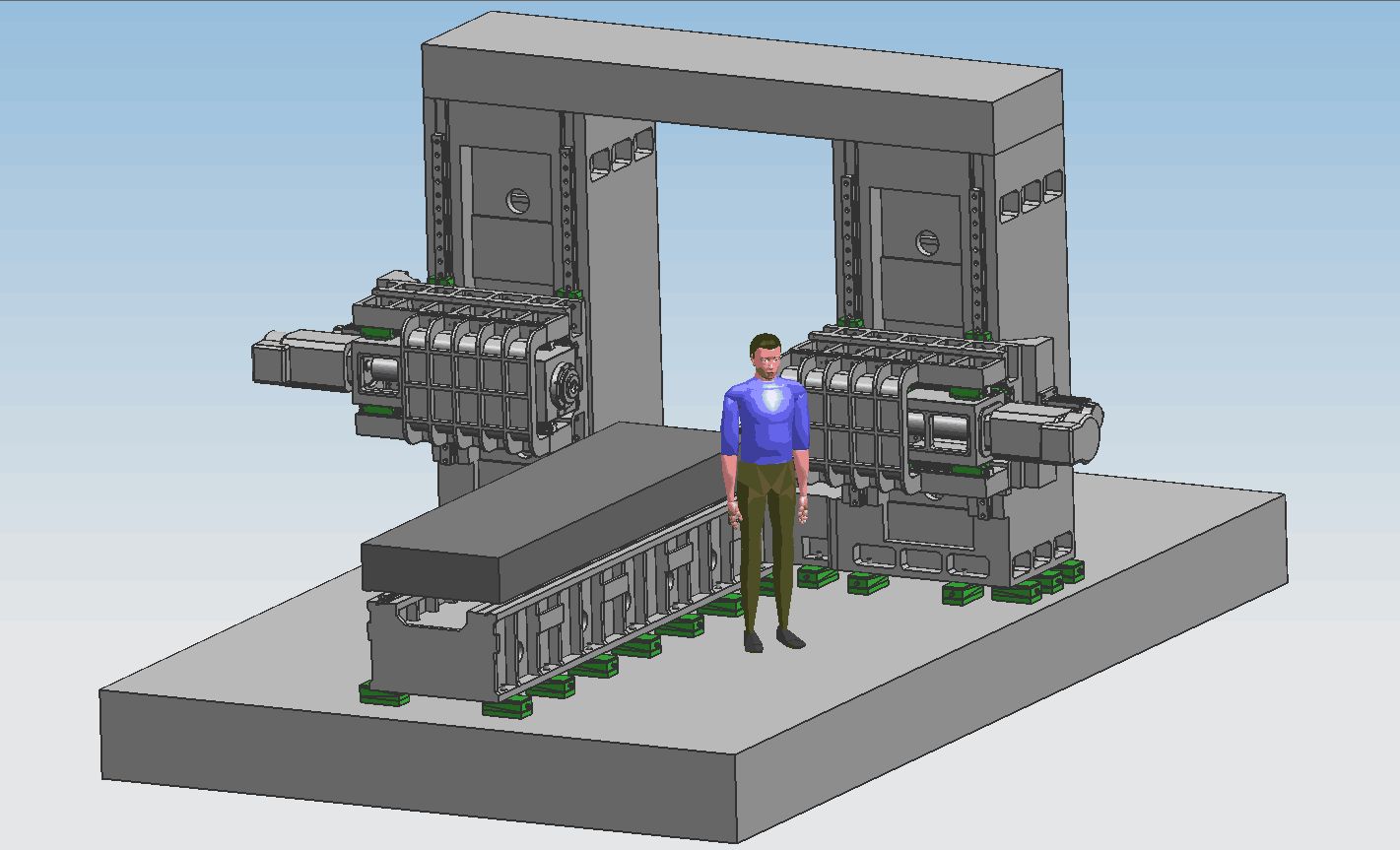
BOSM- 12000 * 1000 tetep-beam CNC gantry ganda-kolom sirah-to-sirah boring tur mesin panggilingan mangrupakeun alat mesin husus pikeun ngolah excavator leungeun / iteuk. Bantal, bisa ngawujudkeun processing gancang tina workpiece nu, workpiece nu bisa dibor, giling, sarta bosen dina rentang stroke éféktif, workpiece nu bisa diolah di tempat dina hiji waktu (teu kudu clamping sekundér), loading na unloading speed. gancang, laju positioning gancang, jeung akurasi processing tinggi. High, efisiensi processing tinggi.
2.Struktur mesinFitur:
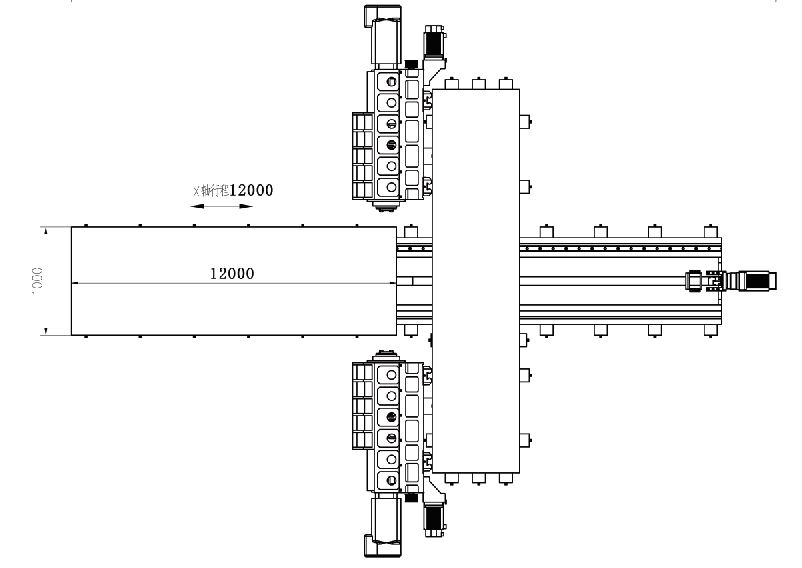
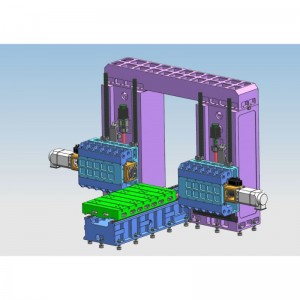
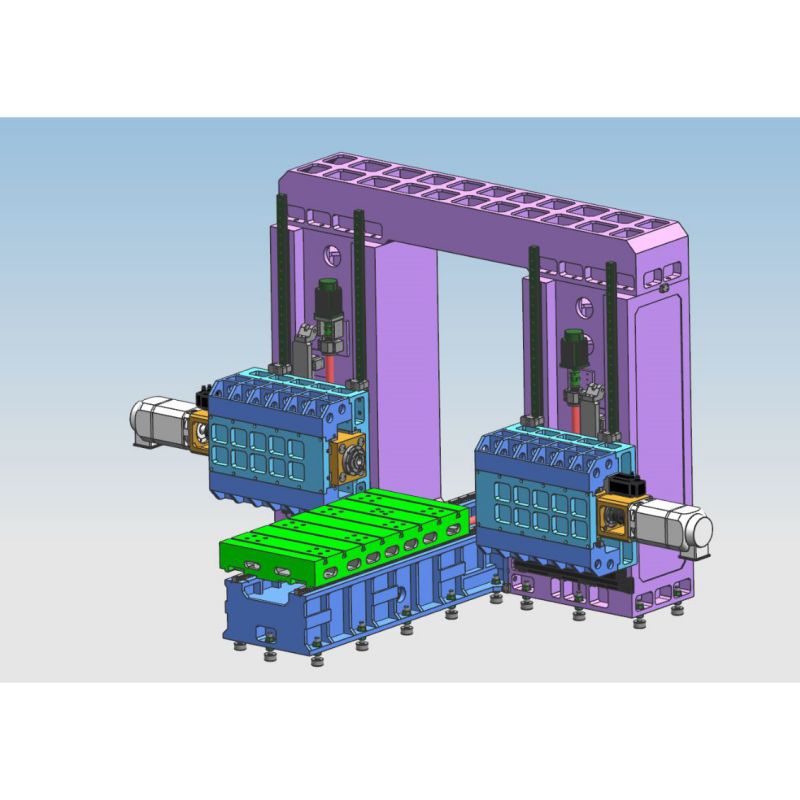
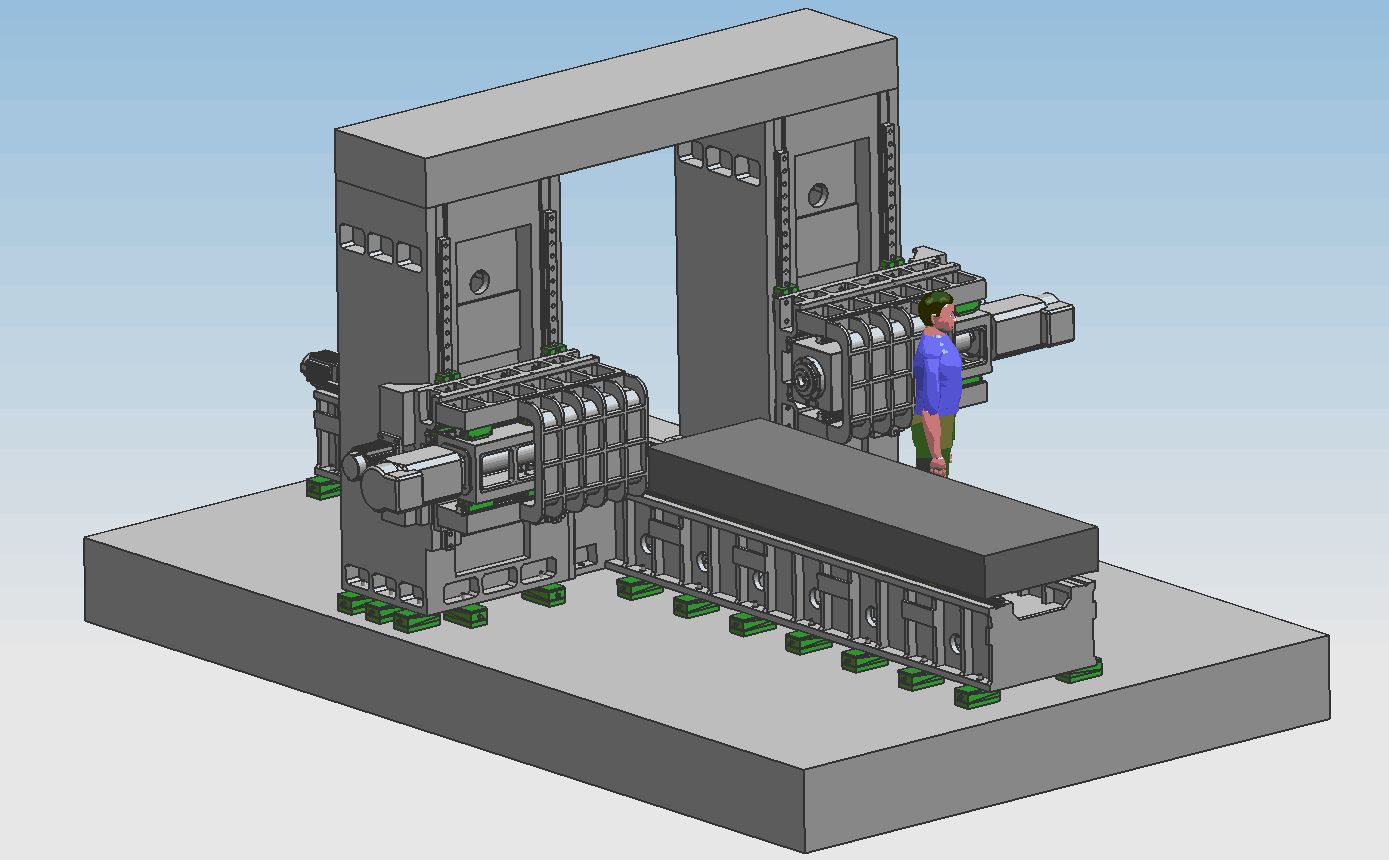
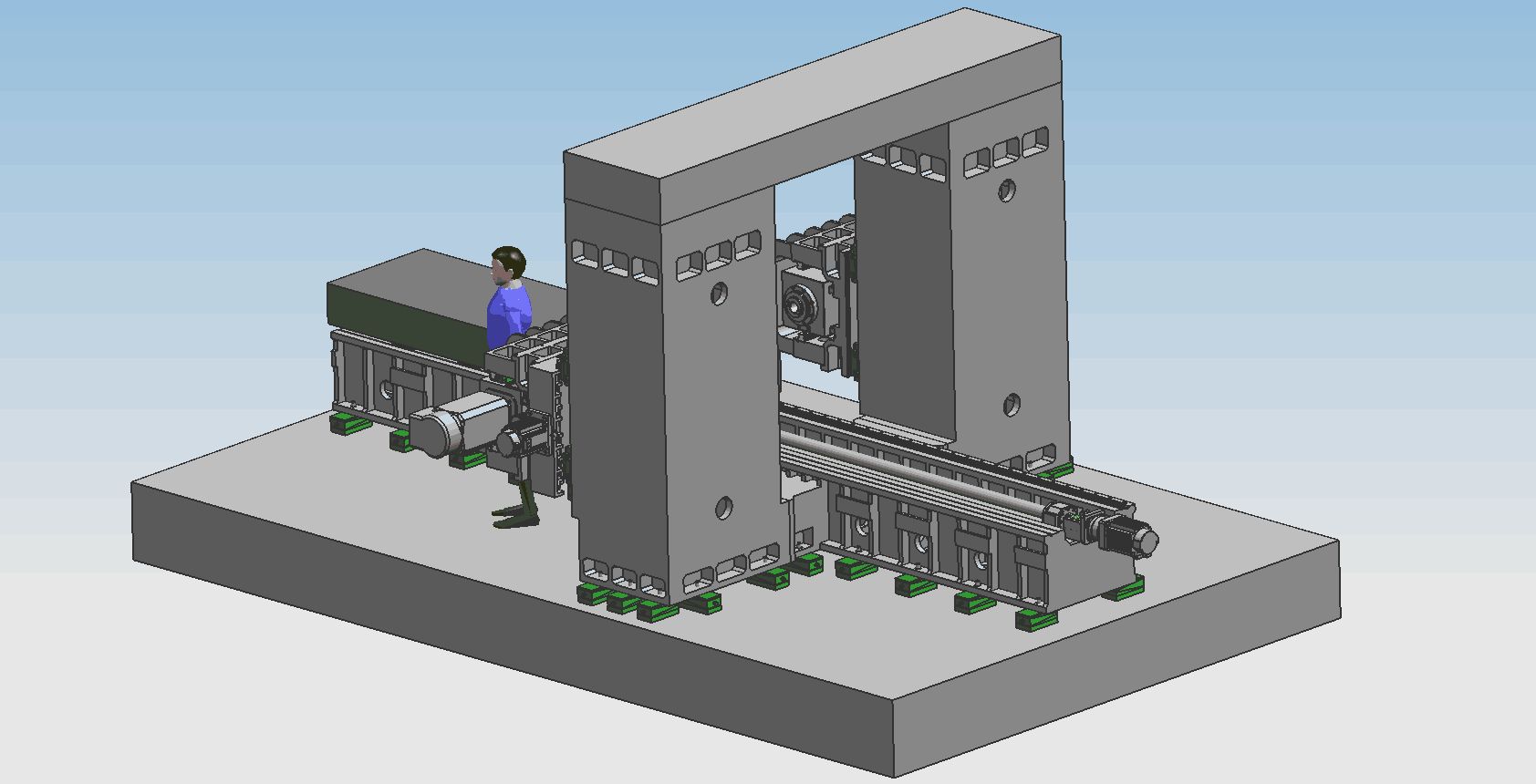
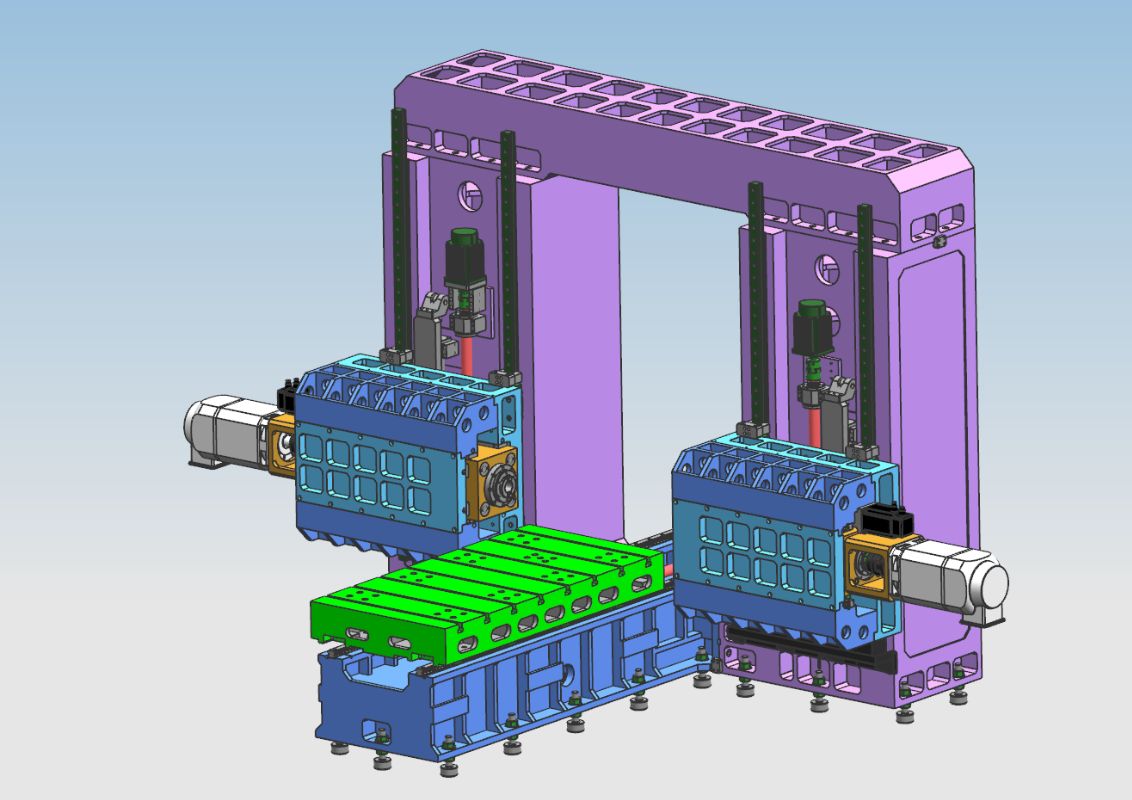
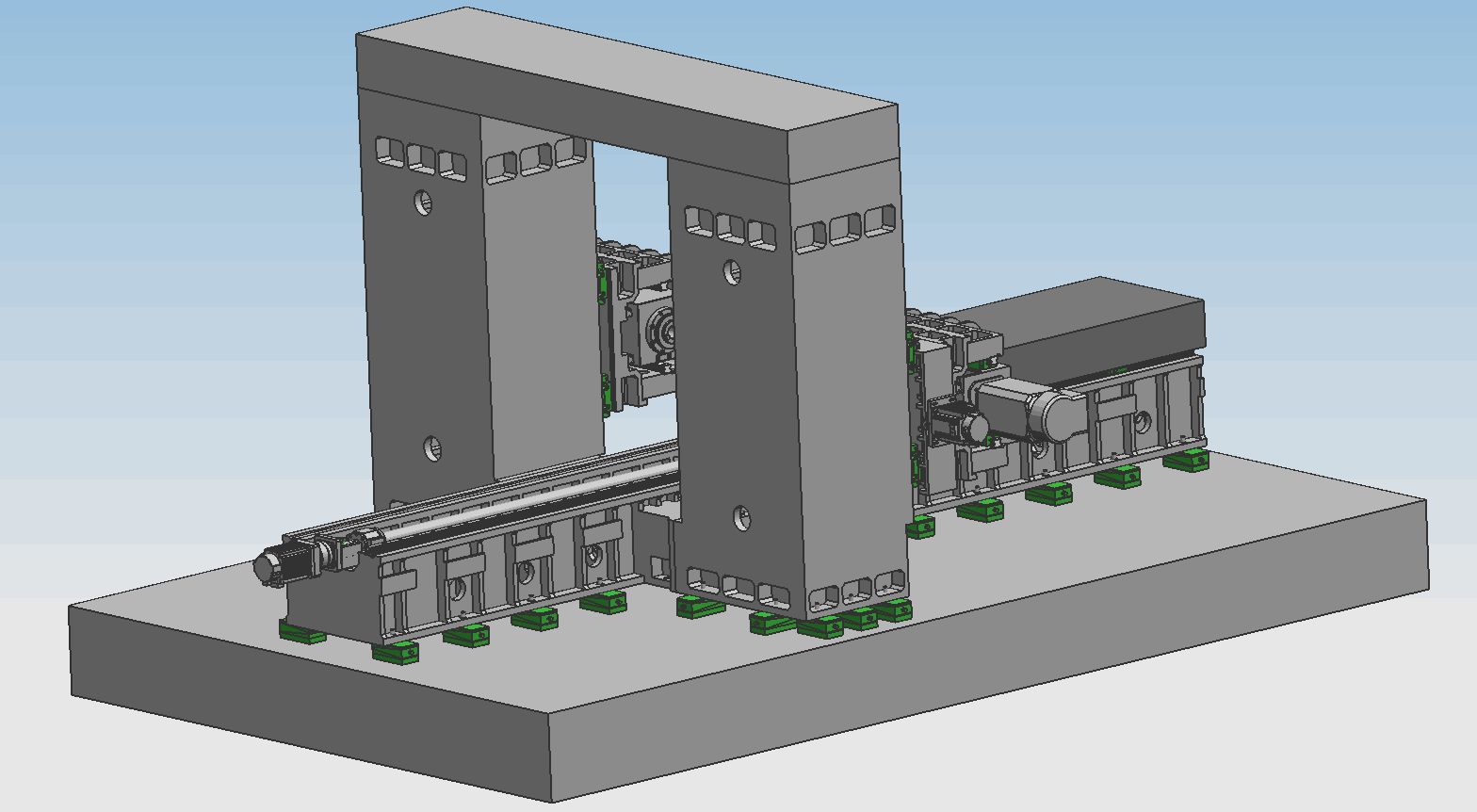
Komponén utama alat mesin: ranjang, workbench, kolom kénca jeung katuhu, balok, gantry nyambungkeun balok, saddles, rams, jsb, bagian badag dijieunna tina molding keusik résin, beusi abu kualitas luhur 250 casting, annealed dina panas. liang keusik → Geter sepuh → perlakuan panas Tungku annealing → Geter sepuh → kasar machining → Geter sepuh → tungku panas annealing → Geter sepuh → pagawean, sagemblengna ngaleungitkeun stress négatip tina bagian, sarta tetep kinerja bagian stabil. Ranjang tetep, kolom kénca jeung katuhu, gantry, sarta workbench move; Cai mibanda fungsi panggilingan, boring, pangeboran, countersinking, ngetok, jsb Metode cooling alat nyaeta cooling éksternal. Alat mesin ngandung 5 sumbu feed, anu tiasa ngawujudkeun beungkeut 4 sumbu sareng aksi tunggal 5 sumbu. Aya 2 sirah kakuatan. Sumbu alat mesin sareng sirah kakuatan dipidangkeun dina gambar di handap ieu.
2.1.Struktur utama bagian feed transmisi axial
2.1.1.Sumbu X:Meja kerja ngabales lateral sapanjang rel pituduh tina ranjang tetep.
X 1- sumbu drive: AC servo motor ditambah-precision tinggi planet reducer didorong ku bola screw pikeun ngajalankeun gerakan workbench pikeun ngawujudkeun gerak linier sumbu X
Bentuk rel pituduh: iklaskeun dua rel pituduh linier precision tinggi-kakuatan.
2.1.2 Z1 sumbu:Kakuatan sirah sarta sela anu vertikal dipasang dina sisi hareup kolom, sarta ngabalikeun luhur jeung ka handap sapanjang rail pituduh kolom.
Pangiriman sumbu Z1: motor servo AC sareng kabayang sinkron dianggo pikeun ngajalankeun bal screw pikeun nyetir sela pikeun ngawujudkeun gerak linier sumbu Z.
2.1.3 sumbu Z2:Kakuatan sirah sarta sela anu vertikal dipasang dina sisi hareup kolom, sarta ngabalikeun luhur jeung ka handap sapanjang rail pituduh kolom.
transmisi Z2-sumbu: AC servo motor jeung kabayang sinkron dipaké pikeun ngajalankeun screw bola ngajalankeun sela pikeun ngawujudkeun Z- sumbu gerak linier.
2.1.4 sumbu Y1:Sadel sirah kakuatan dipasang vertikal dina sisi hareup kolom katuhu, sarta reciprocates kénca jeung katuhu sapanjang rail pituduh kolom.
Pangiriman sumbu Y1: Motor servo AC ditambah réduksi planet-precision tinggi dianggo pikeun ngajalankeun ram pikeun ngaléngkah bal screw pikeun ngawujudkeun gerak linier sumbu Y1-
2.1.5 sumbu Y2:Sadel sirah kakuatan dipasang vertikal dina sisi hareup kolom katuhu, sarta reciprocates kénca jeung katuhu sapanjang rail pituduh kolom.
Y2-sumbu transmisi: AC motor servo tambah-precision tinggi planet reducer dipaké pikeun ngajalankeun ram pikeun mindahkeun ngaliwatan screw bola pikeun ngawujudkeun Y2- sumbu gerak linier.
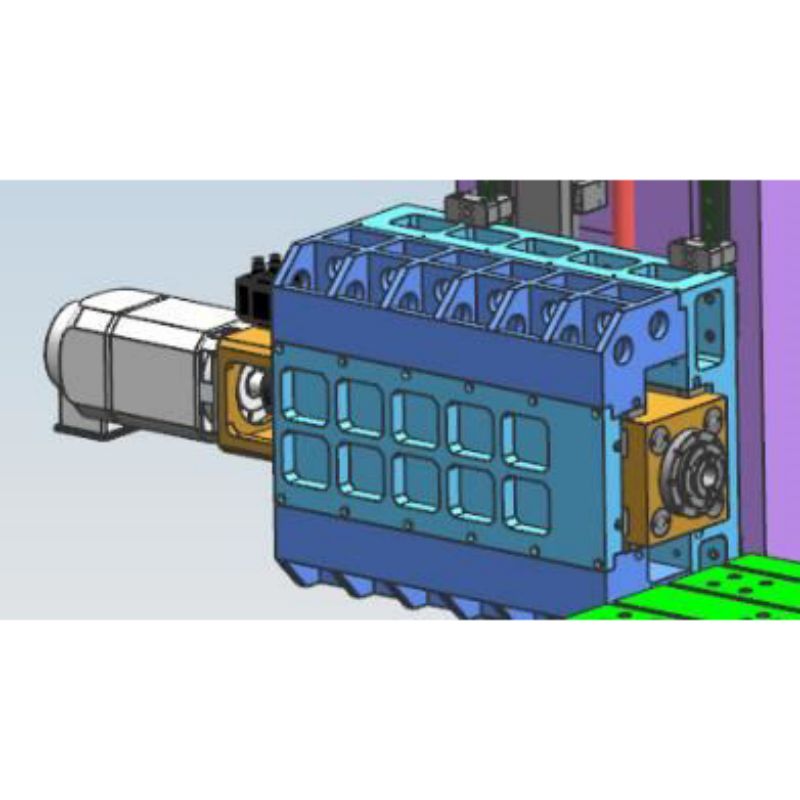
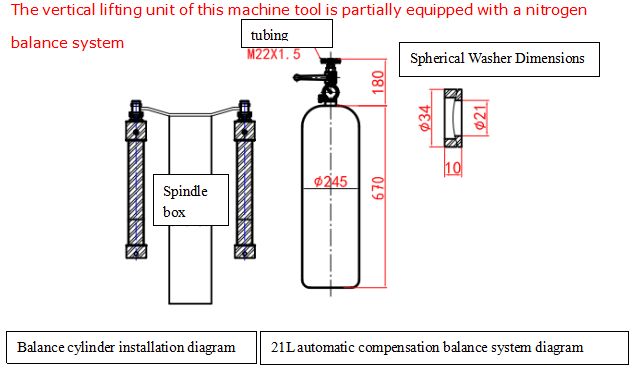
2.2.Arah pindah tina pangeboran sarta panggilingan kakuatan sirah (kaasup kakuatan sirah 1 jeung 2) adopts struktur ram pasagi, paling canggih kawat-teuas dikombinasikeun pituduh rail metoda, rail teuas ieu dikurilingan ku rojongan kuat, 4 linear roller pituduh rail pasang dipandu, sarta drive adopts AC servo motor Nyorong sabuk sinkron (i = 2) jeung precision ball screw transmisi, sirah kakuatan adopts motor servo mun decelerate ngaliwatan sabuk sinkron jeung kabayang sinkron, dipandu ku precision beurat-tugas. pasangan rail pituduh, sarta drive nu screw bola nangtung pikeun muterkeun, merealisasikan kakuatan sirah Do luhur jeung ka handap gerakan nangtung , sarta dilengkepan bar kasaimbangan nitrogén pikeun ngurangan kapasitas bearing tina sirah mesin dina screw na servo motor. Motor sumbu-Z ngagaduhan fungsi marake otomatis. Dina kasus gagalna kakuatan, rem otomatis bakal nahan aci motor pageuh. , ku kituna teu bisa muter. Nalika digawé, nalika bit bor teu noél workpiece nu, éta bakal eupan gancang; nalika bor bit némpél workpiece nu, éta otomatis bakal pindah ka feed digawé. Nalika bit bor penetrates workpiece nu, éta bakal otomatis pindah ka mundur gancang; nalika tungtung bor bit ninggalkeun workpiece tur ngahontal posisi set, worktable bakal pindah ka posisi liang hareup pikeun ngawujudkeun sirkulasi otomatis. Kapala kakuatan ngadopsi kombinasi kawat sareng rel keras, anu henteu ngan ukur ngajamin laju alat, tapi ogé ningkatkeun kaku alat. Sarta eta bisa ngawujudkeun fungsi buta liang pangeboran, panggilingan, chamfering, chip megatkeun, panyabutan chip otomatis, jeung sajabana, nu ngaronjatkeun produktivitas tanaga gawé.
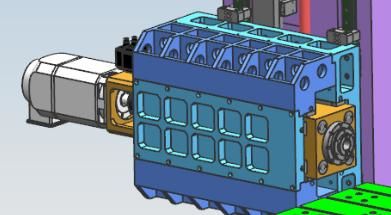
(kenca kakuatan sirah)
2.3. panyabutan chip sarta cooling
Aya spiral jeung datar ranté chip conveyors dipasang dina dua sisi handap workbench, sarta chip bisa otomatis discharged kana conveyor chip dina tungtung ngaliwatan dua tahapan spiral jeung ranté pelat pikeun ngawujudkeun produksi beradab. Aya pompa cooling dina tank coolant tina conveyor chip, nu bisa dipaké pikeun cooling éksternal alat pikeun mastikeun kinerja pangeboran sarta hirup jasa tina bit bor, sarta coolant nu bisa didaur ulang.
3.Sistim kontrol numerik digital pinuh:
3.1.Kalayan fungsi pegatna chip, waktos pegatna chip sareng siklus pegatna chip tiasa disetél dina antarmuka manusa-mesin.
3.2.Kalayan fungsi ngangkat alat, jangkungna angkat alat tiasa disetél dina antarmuka manusa-mesin. Nalika pangeboran ngahontal jangkungna ieu, bit bor gancang diangkat ka luhur workpiece nu, lajeng chip dialungkeun jauh, lajeng gancang diteruskeun kana beungeut pangeboran tur otomatis dirobah jadi karya.
3.3.Kotak kontrol operasi terpusat sareng unit genggam ngadopsi sistem kontrol numerik sareng dilengkepan antarmuka USB sareng tampilan kristal cair LCD. Pikeun ngagampangkeun program, neundeun, tampilan sareng komunikasi, antarmuka operasi ngagaduhan fungsi sapertos dialog manusa-mesin, kompensasi kasalahan, sareng alarm otomatis.
3.4.alat-alat nu boga fungsi nilik na ulang inspecting posisi liang saméméh ngolah, sarta operasi pisan merenah.
4. Lubrication otomatis
Alat mesin precision linear guide rail pasang, precision bola screw pasang jeung-precision tinggi pasang gerak anu dilengkepan sistem lubrication otomatis. Pompa lubricating otomatis outputs minyak tekanan, sarta chamber minyak lubricator kuantitatif asup kana minyak. Saatos chamber minyak ngeusi minyak, nalika tekanan sistem naék ka 1.4-1.75Mpa, switch tekanan dina sistem ditutup, pompa eureun, sarta klep unloading unloads dina waktos anu sareng. Nalika tekanan minyak di jalan turun di handap 0.2Mpa, lubricator kuantitatif mimiti ngeusian titik lubricating sareng ngalengkepan hiji ngeusian minyak. Kusabab suplai minyak akurat tina injector minyak kuantitatif sareng deteksi tekanan sistem, suplai minyak tiasa dipercaya, mastikeun yén aya pilem minyak dina permukaan unggal pasangan kinematic, ngirangan gesekan sareng ngagem, sareng nyegah karusakan kana. struktur internal disababkeun ku overheating. , pikeun mastikeun katepatan sareng kahirupan alat mesin. Dibandingkeun sareng pasangan rel pituduh ngageser, pasangan rel pituduh linier anu dianggo dina alat mesin ieu ngagaduhan sababaraha kaunggulan:
①The sensitipitas gerak tinggi, koefisien gesekan tina rolling pituduh rail leutik, ngan 0.0025 ~ 0.01, sarta kakuatan nyetir ieu greatly ngurangan, nu ngan sarua jeung 1/10 tina mesin biasa.
② Beda antara gesekan dinamis jeung statik pisan leutik, sarta kinerja nurutan-up téh alus teuing, nyaeta, interval waktu antara sinyal nyetir jeung aksi mékanis pisan pondok, nu kondusif pikeun ngaronjatkeun kagancangan respon jeung sensitipitas. sistem kontrol numerik.
③Ieu cocog pikeun-speed tinggi gerak linier, sarta speed sakedapan nyaeta ngeunaan 10 kali leuwih luhur ti nu ngageser rel pituduh.
④ Bisa ngawujudkeun gerakan gapless sarta ngaronjatkeun rigidity gerakan tina sistem mékanis.
⑤Dihasilkeun ku pabrik profésional, éta boga precision tinggi, versatility alus tur pangropéa gampang.
5. Lingkungan pamakéan mesin:
Catu daya: tilu-fase AC380V ± 10%, 50Hz ± 1 Suhu ambient: 0 ° ~ 45 °
Lima, parameter téknis utama:
6. Parameter téknis
| Modél | BOSM12010 | |
| Ukuran workpiece processing maksimum | Panjang × rubak × jangkungna (mm) | 12000 × 1000 × 1500 |
| Diaméterna cutter maksimum | 200 mm | |
| feed maksimum Gantry | Lebar (mm) | 1300 |
| ukuran meja kerja | Panjang X Lebar (mm) | 12000*1000 |
|
sirah pangeboran tipe ram horizontal sirah kakuatan hiji dua
| kuantitas (2) | 2 |
| Spindle taper | BT50 | |
| Diaméter pangeboran (mm) | Φ2-Φ60 | |
| Diaméter ngetok (mm) | M3-M30 | |
| Laju spindle (r / mnt) | 30~6000 | |
| Daya motor spindle servo (kw) | 37 | |
| Jarak irung spindle ti puseur méja (mm) | 150-650 | |
| Goresan kénca sareng katuhu tina hiji ram (mm) | 500 | |
| Jarak antara puseur ram jeung pesawat tabel (mm) | 200-1700 | |
| Kaluhur jeung ka handap stroke ram (mm) | 1500 | |
| Repeatability | 300mm * 300mm | ± 0,02 |
| Ukuran Alat Mesin | Panjang × rubak × jangkungna (mm) | nurutkeun gambar |
| Beurat kotor (t) | (kira-kira) 62 | |
Parameter di luhur mangrupakeun parameter desain awal. Dina desain sabenerna, meureun aya parobahan nurutkeun sarat processing workpiece jeung sarat desain alat mesin, ku kituna pikeun minuhan sarat tina bagian processing parusahaan anjeun.